¿Podemos evitar “acumular” errores planificando varias series de alineadores ‘in office’?
Artículo en inglés: https://pmc.ncbi.nlm.nih.gov/articles/PMC12216223/pdf/41598_2025_Article_7110.pdf
Bueno, hoy tenemos buenas y malas noticias.
Este artículo nos presenta un enfoque que mejora el movimiento de caninos en casos de extracciones.
Peeeero esto implica un gran “trabajo” por parte del clínico y múltiples intervenciones en los pacientes, un aumento del número de visitas.
Así que, vaya por delante: depende de cada profesional valorar si esto, que efectivamente mejora el resultado, compensa en tiempo y recursos la desviación con movimientos convencionales.
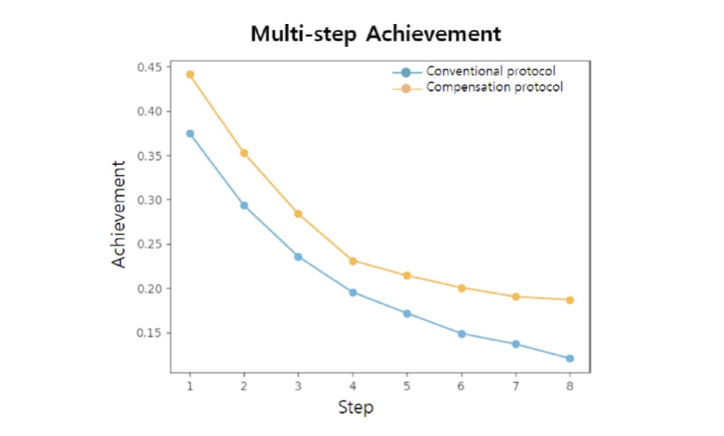
En fin, entramos en materia… el artículo plantea dos enfoques principales para el movimiento de caninos durante el cierre de espacios con alineadores transparentes:
- Protocolo convencional
- Asume que cada alineador logra el 100 % del movimiento planificado (por ejemplo, 0,25 mm por etapa).
- En la práctica, esto rara vez ocurre, por lo que se acumulan errores con cada etapa.
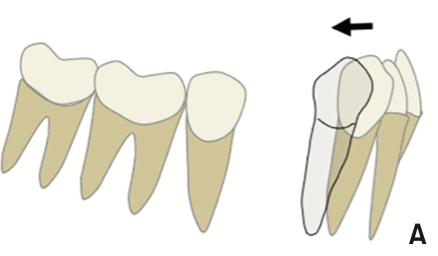
- El resultado típico es un aumento progresivo del tipping, pérdida de control sobre el movimiento en masa, y discrepancia creciente entre lo planificado y lo logrado.
- En la simulación, el tipping superó los 6°, la raíz tendía a moverse en dirección opuesta a la corona y se observó extrusión progresiva del canino.
- Protocolo de compensación
- Es adaptativo e iterativo: después de cada etapa, se mide el movimiento real conseguido (usando simulación por elemento finito, FEM) y el siguiente alineador se diseña basándose en ese dato, no en el valor teórico inicial.
- Incorpora un diseño anti-tipping, aplicando una rotación compensatoria (~3,6° en dirección contraria a la prevista) para mantener la corona y la raíz alineadas en su desplazamiento.
- Ajusta la magnitud del movimiento en cada etapa a aproximadamente el 70 % del plan inicial, reduciendo sobrecorrecciones y errores acumulados.
- En la simulación, mantuvo el tipping por debajo de 1°, la corona y la raíz se movieron en la misma dirección (movimiento corporal estable), y la extrusión fue mínima.
- Logró una mejor concordancia entre el movimiento planeado y el real, reduciendo el desajuste en un 50 % respecto al protocolo convencional.
Nuestra opinión
En resumen, el enfoque convencional es más simple pero acumula errores y favorece inclinaciones no deseadas, mientras que el enfoque de compensación corrige cada paso basándose en el movimiento real, mejorando la precisión y el control del desplazamiento de los caninos, aunque requiere más etapas, más tiempo y mayor complejidad técnica.
¿Qué pensamos? Que abre luz para el futuro. Pero no es para hoy.
Pincha aquí abajo si quieres aplicar estos conocimientos a diario.